第19届亚洲计算机辅助外科会议(The 19th Asian Conference on Computer Aided Surgery,ACCAS2023)于5月20-21日在苏州金鸡湖国际会议中心召开。经过激烈竞争和国际同行的严格评审,会后评选出4篇“优秀论文奖”(Excellent Paper Award),近期清华大学医学院生物医学工程系廖洪恩教授团队的2020级硕士生戴尚琪收到获奖通知。
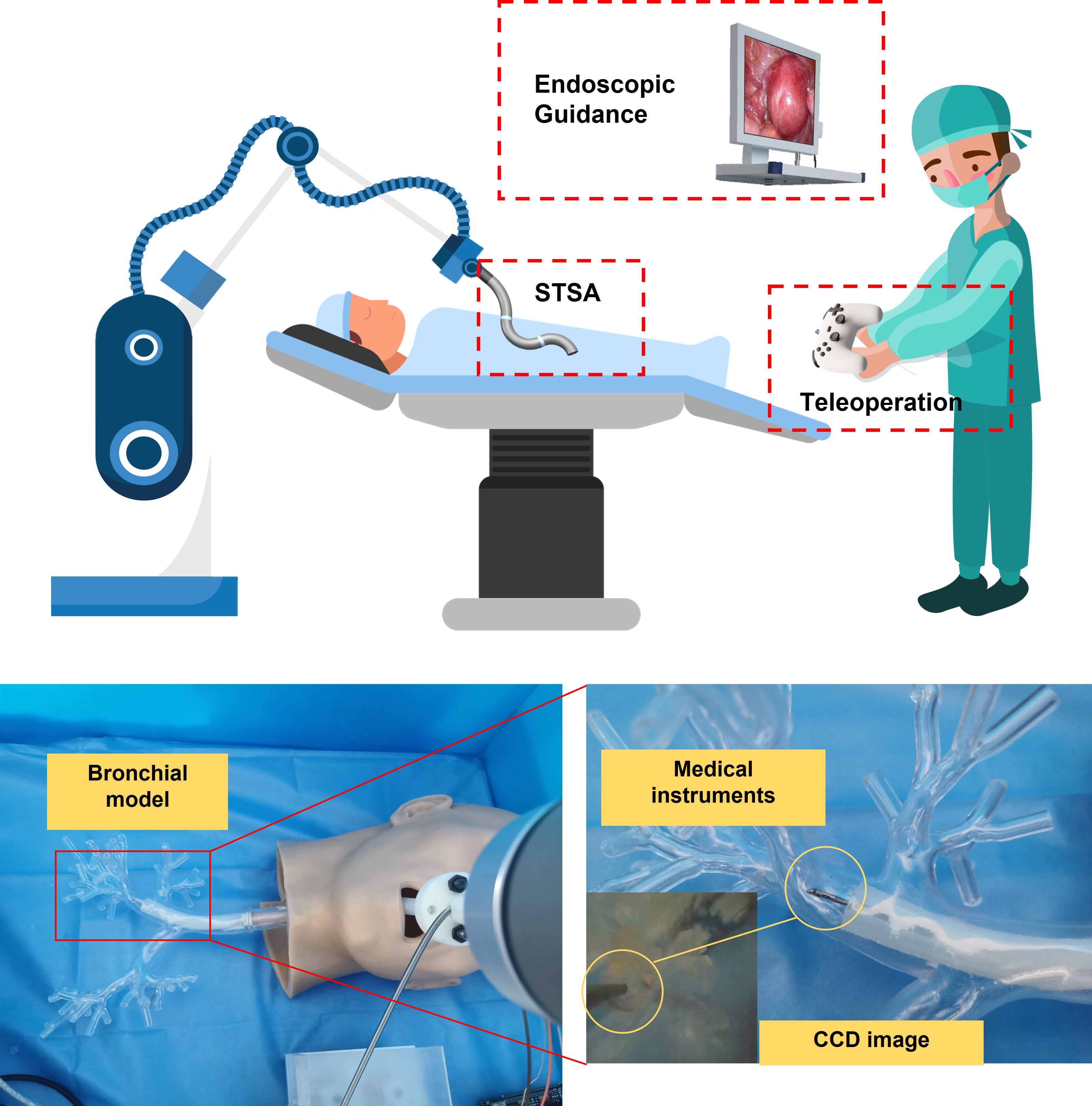
戴尚琪凭借论文《基于热塑性聚合物的线驱可变刚度柔性致动器》(Modeling of Tendon Driven Soft Robot with Stiffness-Tunable Structure),荣获“优秀论文奖”。软体材料因为其高度灵活性及柔性交互等优势,被研究者用于开发柔性手术器械。然而纯软材料构成的器械存在刚度低、负载能力差、稳定性差等问题,极大的限制了柔性器械在临床上的应用。因此实现柔性器械的可变刚度至关重要,在应用过程中可调节器械的刚度以满足不同的灵活性及负载需求。该论文提出了基于热塑性聚合物的可变刚度柔性致动器,这是一种将纯软体致动器与热塑性聚合物树脂结构相结合的新型致动器设计。论文受仿生结构启发设计螺旋型聚合物结构,可实现最大30倍的刚度调制范围,在保留软体材料柔性优势的同时大大提升了致动器的稳定性和可控性。论文采用线驱动的方式,减弱对驱动腔道的空间要求,实现致动器的小型化,可适用于如支气管、主动脉等狭窄空间的术中操作。论文以可变刚度柔性致动器作为前端器械搭建了微创诊疗手术机器人系统,致动器上设计有多个器械通道可用于提供术中视野、器械递送等功能,并在腹腔镜、支气管镜等模拟医疗场景中进行了初步验证。论文所提出的可变刚度柔性致动器增强了柔性器械对于术中复杂环境及复杂任务的适应性,显著提高了软体机器人在微创手术等医疗场景中的应用潜力。
另外,2018级博士韩博轩与北京大学医学院团队深度合作,共同发表的论文《基于非刚性配准的颌面外科跨中线骨病变的虚拟规划研究》(Non-rigid Registration-Based Virtual Planning on Maxillofacial Surgery with Bone Lesions Across the Midline)也获得了会议的“优秀论文奖”。论文将中线上有颌面部骨病变(包括创伤、肿瘤和骨髓炎)需要手术干预的患者纳入研究,初步建立基于非刚性配准的中线骨病变虚拟规划算法。
上述两篇获奖论文提出的新型医疗机器人前端设计与智能医学影像诊断技术揭示了未来智能医疗的发展趋势,为实现医疗机器人自主化精准控制及对医疗影像信息的最优理解与利用具有重要意义,同时也体现了实验室在医疗健康领域立足眼前并兼顾长远发展的自主创新方向。
以上研究得到包括国家自然科学基金国家重大科研仪器研制项目、科技部国家重点研发专项和北京市自然科学基金等项目的支持。廖洪恩教授团队在智能微创诊疗一体化、高性能裸眼三维立体医学影像、新型手术机器人与智能控制等研究领域取得了一系列的重要成果,团队致力于突破传统意义微创手术概念,开拓新兴微创高精度诊疗领域,旨在为未来的智能型诊疗设备研发及临床应用奠定基础。经过多年的努力,团队将“微创诊疗一体化”与未来新型医疗模式紧密结合,并先后在多模态影像学、精准微创手术导航领域获得了多项重要成果。
亚洲计算机辅助外科大会是由亚洲计算机辅助外科领域科学家、临床医生和研究者发起的专业会议。每年有来自中国、日本、韩国、新加坡、泰国在内的多个国家上百位的研究者参与,旨在交流探讨精准计算机辅助外科领域的最新研究工作和进展,近年在智能精准诊疗方面也涌现出大量的创新成果。
