2023年5月18-21日,第十二届亚太医学和生物工程大会&2023中国生物医学工程大会暨创新医疗峰会在苏州召开。此次大会共收到2108份投稿,其中有10位青年学者入围了国际医学与生物工程联合会(International Federation for Medical and Biological Engineering,IFMBE )“青年学者竞赛”(IFBME Young Investigator Competition)复赛。最终经过激烈竞争,清华大学医学院生物医学工程系廖洪恩教授团队2016级博士生廖筑秀凭借论文《用于非结构环境的磁气混合驱动软体机器人》(A Soft Robot Using Magnetic-pneumatic Hybrid Actuation that Functions in Unstructured Environments)斩获“青年学者竞赛”唯一的一等奖(The First Award),并在现场接受IFMBE秘书长Kang-Ping Lin教授以及国际医学物理与工程科学联盟(International Union of Physical and Engineering Sciences in Medicine,IUPESM)秘书长Magdalena Stoeva颁奖。

廖筑秀(中)的获奖合影
与传统的刚性机器人相比,软体机器人凭借其良好的柔顺性、适应性和小型化潜力,显示出了巨大的医疗和工业应用价值。本论文针对微创手术及经自然腔道手术中手术空间狭窄、传统手术器械灵活性不足等问题,在磁气混合驱动软体机器人的新领域中取得了突破。该研究首次提出了磁气混合驱动的软体机器人设计方案,创新性地将磁场驱动和气动驱动进行结合,实现了机器人在多种非结构化环境下的快速、可控运动。
论文建立了基于磁气混合驱动软体机器人的仿生运动步态理论模型、驱动与控制方案,实现了对磁气混合驱动机器人的快速精确控制。同时在结构设计、充磁方案、驱动控制时序等方面进行了研究,大大提升了机器人的运动性能,实现了机器人在不同复杂场景的应用。在临床应用方面,实现了机器人术中影像采集、自主运动及药物输送等功能,展现出了极大的临床医学应用潜力。该技术有望应用于微创手术及经自然腔道手术,并辅助医生完成快速、高效、精准的术中诊断及治疗操作。
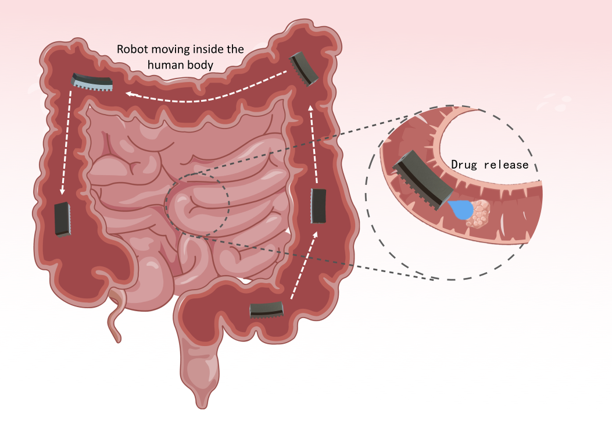
磁气混合驱动的医用软体机器人的临床应用示意图
廖洪恩研究团队致力于开拓微创高精度诊断治疗一体化领域,推进医工交叉应用,在医学影像和医疗机器人领域取得一系列国际瞩目的重要成果。该团队自开展医疗机器人领域研究以来开发了多种软体机器人及微创诊疗器械,与其提出的“微创诊疗一体化”未来新型医疗模式紧密结合。本论文提出的磁气混合驱动的软体机器人方案,提升了机器人在自然腔道等非结构化场景中的检查和操作能力,揭示了未来微创诊疗器械柔性化、诊疗一体化的趋势,并对减少病人痛苦和提高手术效率具有重要意义。上述研究得到了包括国家自然科学基金国家重大科研仪器研制项目、国家重点研发计划重点项目、北京市自然科学基金等的支持。
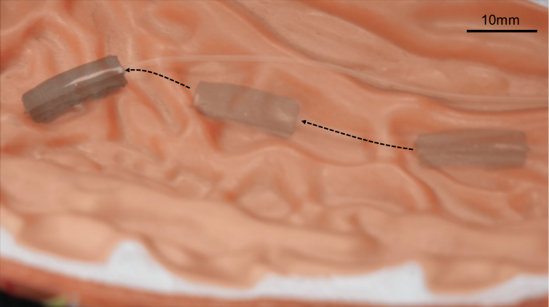
磁气混合驱动软体机器人在胃仿体模型中的运动实验图
亚太医学和生物工程大会由国际医学与生物工程联合会主办,为亚太地区生物医学工程领域三年一度的重要学术会议。今年还联合了中国生物医学工程大会暨创新医疗峰会(2023 China Biomedical Engineering Conference and Medical Innovation Summit,BME 2023)共同举办。会议秉承“医工整合发展 创新引领未来”的主题,聚集生物医学工程重点领域和关键技术,致力于推进学科发展与医、企、研、教的融合。
